ARDebug
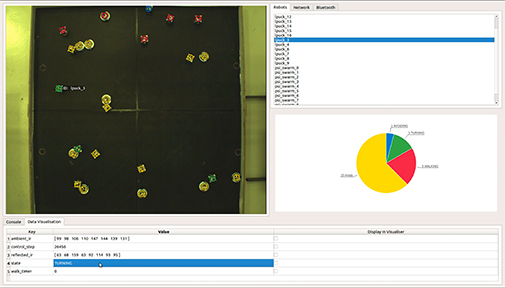
ARDebug is an open-source, cross-platform, and modular tool that allows the user to visualise the internal state of a robot swarm using graphical augmented reality techniques. The software is specifically designed with adoption by other institutions in mind, and aims to provide an extensible tool that other researchers can easily integrate with their own experimental infrastructures.
Publication
Millard, A.G., Redpath, R., Jewers, A.M., Arndt, C., Joyce, R., Hilder, J.A., McDaid, L.J. and Halliday, D.M., 2018. ARDebug: an augmented reality tool for analysing and debugging swarm robotic systems. Frontiers in Robotics and AI, 5, p.87.
Video demonstrations
Version 1.1
Version 1.0
Software download
Source code for the application is freely available for download from our GitHub account.