The Psi Swarm Robot
The Psi Swarm robot is a new platform developed at the York Robotics Laboratory that is designed to allow low-cost swarms of robots to be assembled for use in research, teaching and outreach. On these pages you can find resources and documentation for the Psi Swarm robot and videos of it in use .
.
Introduction
A Psi Swarm robot comprises the main Psi Swarm PCB, a two-part 3D printer plastic shell, an MBED LPC1768 microcontroller and various optional modules. The MBED LPC1768 is widely available at most large electronics merchants, including Farnell (UK), and costs around £40 GBP. The optional modules include the BlueSMIRF series of Bluetooth to RS-232 adapters, an SRF02 ultrasonic module and a CMPS11 tilt-compensated compass module; all of these are available from Hobbytronics.
API Library and Documentation
A dedicated MBED team exists for the Psi Swarm robot and can be found a joined here: https://developer.mbed.org/teams/Psi-Swarm-Robot/
A current version of the PsiSwarm API library implemented in C++ (version 0.8) can be found here: https://developer.mbed.org/teams/Psi-Swarm-Robot/code/PsiSwarmV8_CPP/
A blank example program using this version of the library can be found here: https://developer.mbed.org/teams/Psi-Swarm-Robot/code/PsiSwarm_V7_Blank/
The latest draft of the PsiSwarm manual can be found here: Psi Swarm Draft Manual V0.81 (PDF ![]() , 3,321kb)
, 3,321kb)
A online version of the Doxygen-generated API documentation for this library can be found here: http://www-users.york.ac.uk/~jah128/psiswarm/
Old Versions
The last version of the old PsiSwarm C API library is version 0.7 (as of October 2016) and can be found here: https://developer.mbed.org/teams/Psi-Swarm-Robot/code/PsiSwarmV7/
A blank example program using this version of the library can be found here: https://developer.mbed.org/teams/Psi-Swarm-Robot/code/PsiSwarm_V7_Blank/
A copy of the above program and library, exported for use with the GCC ARM compiler, can be downloaded here: PsiSwarm-GCC-ARM-Version07 (zip ![]() , 2,060kb)
, 2,060kb)
Documentation
The latest draft version of the Psi Swarm manual can be found here: Psi Swarm Draft Manual V0.81 (PDF ![]() , 3,321kb)
, 3,321kb)
The manual includes schematic diagrams and parts lists for the main Psi Swarm PCB.
A online version of the Doxygen-generated API documentation for this library can be found here: http://www-users.york.ac.uk/~jah128/psiswarm/
The construction manual for the Psi Swarm robot can be found here: PsiSwarm-Construction (PDF ![]() , 3,473kb)
, 3,473kb)
An extended version of the TAROS 2016 paper "The Psi Swarm: A low-cost robotics platform and its use in an education setting" (James Hilder, Alexander Horsfield, Alan G. Milland and Jon Timmis) can be found here: PsiSwarmPaper (PDF ![]() , 16,566kb)
, 16,566kb)
Design
The PCB for the Psi Swarm has been designed in Eagle (version 7.2.0). The .BRD and .SCH can be found in this archive: PsiSwarm-Eagle (zip ![]() , 320kb)
, 320kb)
3D Design files for the plastic parts (bottom shim, wheels, various configurations of top hull) can be found in this archive: PsiSwarm-Plastic (zip ![]() , 19,215kb)
, 19,215kb)
Research
The Psi Swarm robot is to be used in the following research projects:
Spanner - University of York (Electronics) and Ulster University
Robocalc - University of York (Computer Science and Electronics)
A Tablet Based Robot Controller for Education - Alexander Horsield, Electronics Undergraduate Project
More details\links to be added.
Videos
The following video shows the tablet-based controller for the Psi Swarm for use in a Key Stage 2 teaching environment.
Android App
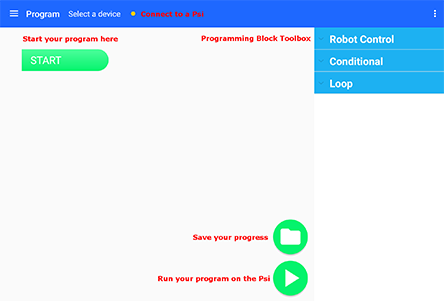
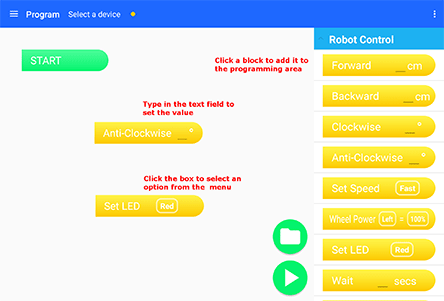
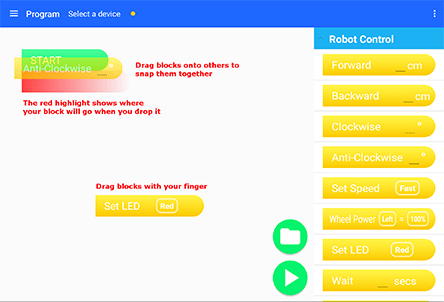
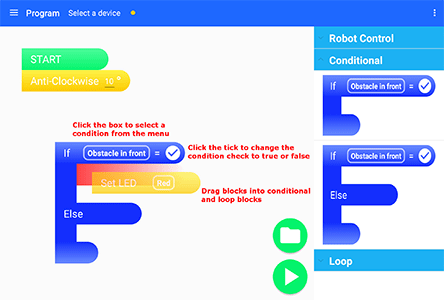
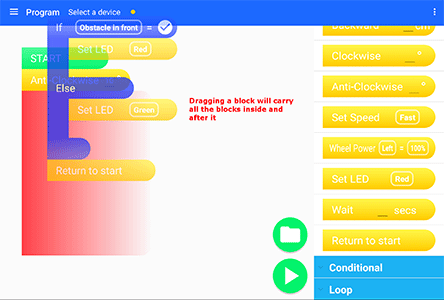
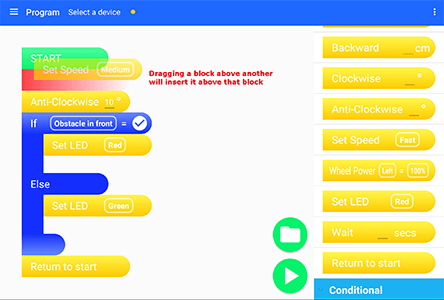
A special Android application for the Psi Swarm robot has been developed as part of a student project, undertaken by Alexander Horsfield, Electronics. The goal of the project was to create a application that could be used in a classroom environment to teaching children aged 7 to 11 core aspects of programming, that form part of the new National Curriculum for Key Stage II.
Work on this project is ongoing an resources will be added to this page, including lesson plans, videos and .APK code, as it is finalised.
| Application Screenshots and Tutorial |
 |
 |
 |
 |
 |
 |