A study of error diversity in robotic swarms for task partitioning in foraging tasks
Authors:
Edgar Buchanan, Kieran Alden, Andrew Pomfret, Jon Timmis, Andy Tyrrell
Abstract:
Often in swarm robotics, an assumption is made that all robots in the swarm behave the same and will have a similar (if not the same) error model. However, in reality this is not the case and this lack of uniformity in the error model, and other operations, can lead to various emergent behaviours. This paper considers the impact of the error model and compares robots in a swarm that operate using the same error model (uniform error) against each robot in the swarm having a different error model (thus introducing error diversity). Experiments are presented in the context of a foraging task. Simulation and physical experimental results show the importance of the error model and diversity in achieving expected swarm behaviour.
Video Material:
Video 1
Two robots exchanging items. A robot emits a red light when transporting items.
Video 2
Robot moving forwards for 15 and 30 seconds and attempting to return to the starting position. The longer the distance the robot travels, the greater the error will be and it would be more difficult for the robot to return to the starting position.
| Robot moving for 15 seconds | Robot moving for 30 seconds |
|---|---|
 |
 |
Video 3
Foraging robot transporting items from the item source (right hand) to the home area (left hand). The robot is guided by virtual beacons to each target.
Video 4
Six robots transporting items from an items source (right hand) to the home area (left hand) with no partitions (non-partitioning strategy, NPS). Each number represents the ID of the robot and the character represents the current state of the robot: explore (E), go to items source (S), go to nest (N) and waiting (W). 
Video 5
Robots transporting items with Dynamic Partitioning Strategy (DPS). The item is exchanged directly from robot to robot (direct transfer).
Video 6
Robots transporting items with DPS. The item (white circle) is exchanged by dropping the item on the floor for other robots to pick up (indirect transfer).
Supporting data:
Data Set Archives
[NB These are very large data sets and may require a Google drive account to access, please contact edgar.buchanan@york.ac.uk if there are any problems accessing the file]
Emulation models and results - [12 GB] Link (https://drive.google.com/file/d/190ieTv5NxAASZIwg14EQxdLLgkZtC07o)
Simulation results - [4GB] Link (https://drive.google.com/file/d/1wQMTKZXDikASFdzW5bIefSm-8WPt_TcI)
Hardware models and results - [5MB] Link (https://drive.google.com/file/d/1Yxes45lHDtPxy8DAGW6SSEvI1c4Sr9hm)
Supporting Figures
TP-Complimentary-Figures (PDF ![]() , 11,687kb)
, 11,687kb)
Flexibility evaluation of a robotic swarm with heterogeneous error subjected to (a) distance "d" reduction, (b) error swap model and (c) total robot failures. In the left figure, the distance between home-to-items-source decreases by 20cm after 2.5 hours, 5 hours and 7.5 hours. In the middle figure the robots swap error models with each other. In the right figure, robot F stops working after 2.5 hours, robot E stops working after 5 hours and robot D stops working after 7.5 hours. For all the scenarios, the robots are able to adapt to the changes.
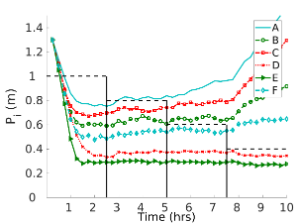
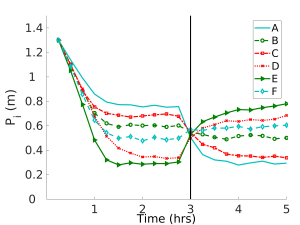
0.1_d_descreasing.png a) 02_error_swap.png b) 03_robot_failures.png c)
Source code for the controller:
Psi-swarm robot controller
https://github.com/edgarbuchanan/psiswarm_task_partitioning