Demonstrator project publishes new method for assuring safety of autonomous systems with deep-learning perception components
Posted on Monday 14 February 2022
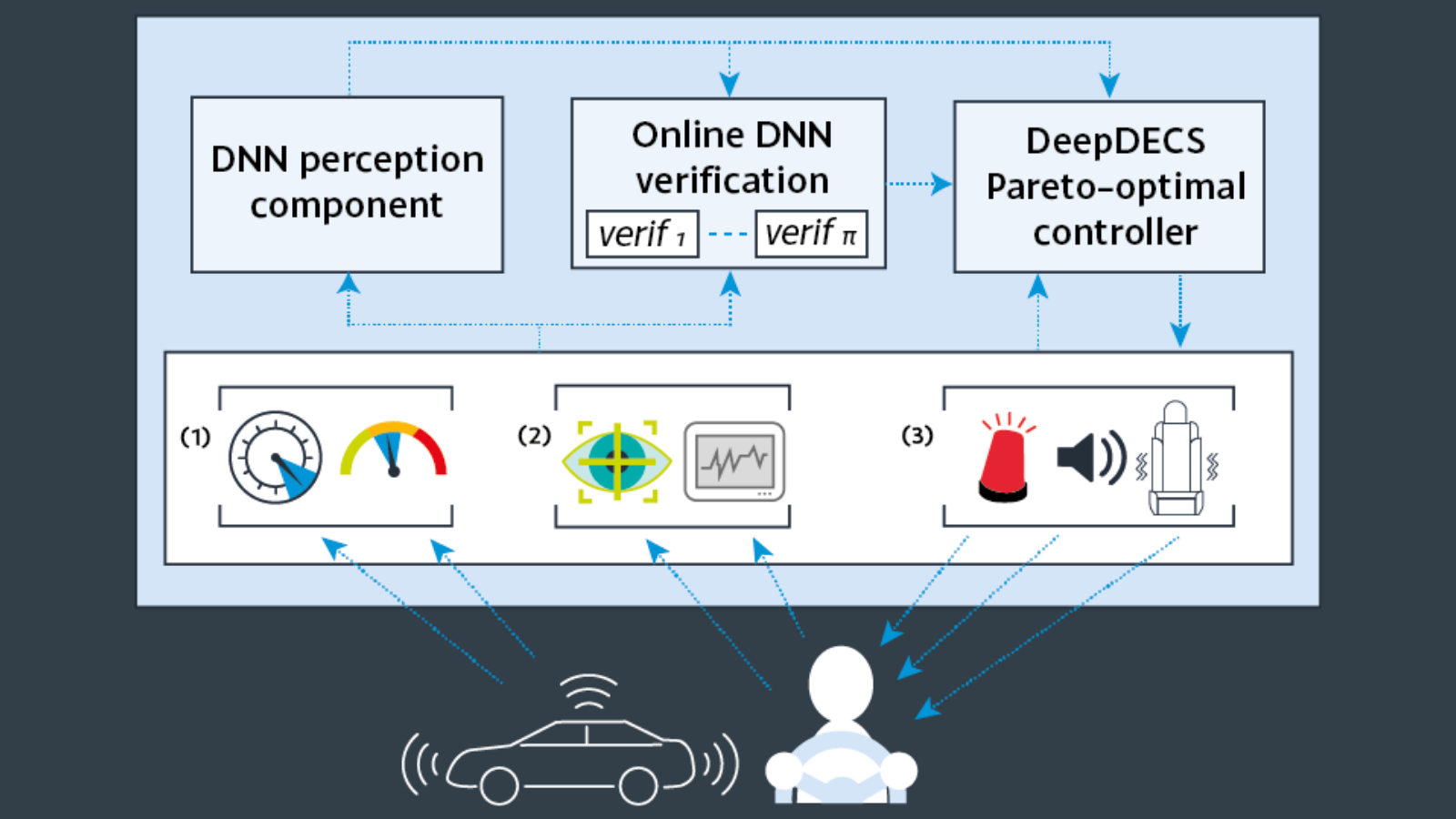
Perception in autonomous systems is often performed using deep neural network (DNN) classifiers. Major challenges arise when attempting to assure the safety of these perception components in the control loop of autonomous systems. Neither well-established methods for formal software verification nor newer verification methods for DNNs are able to provide system-level guarantees for the controllers of autonomous systems with DNN perception components.
The team behind the Safe-SCAD demonstrator project has developed DeepDECS, a controller synthesis method that addresses these significant limitations.
DeepDECS uses a suite of DNN verification methods to quantify the aleatory uncertainty that the use of DNN perception components introduces. Discrete-event controllers guaranteed to satisfy the requirements of the autonomous system are then synthesised from a stochastic model that takes this uncertainty into account and leverages the high accuracy that DNNs can achieve for their verified inputs.