Manufacturing

Body of Knowledge guidance
You can access a number of entries in the Body of Knowledge related to the safety assurance of autonomous systems in manufacturing below. The guidance in the Body of Knowledge is often generalised, enabling you to learn from research undertaken in other domains. You can also access all Body of Knowledge Guidance.
- 1.1.3 Defining operating scenarios
- 1.2.1 Considering human/machine interactions
- 1.4 Impact of security on safety (threat modelling)
- 1.4 Impact of security on safety (policy document)
- 2.6 Handling change during operation
- 2.6.1 Monitoring RAS operation
- 2.7 Using simulation
Demonstrators
We have two demonstrators in the manufacturing domain, linked below. Our projects extend across a range of sectors and you can also view AAIP-funded demonstrator projects.
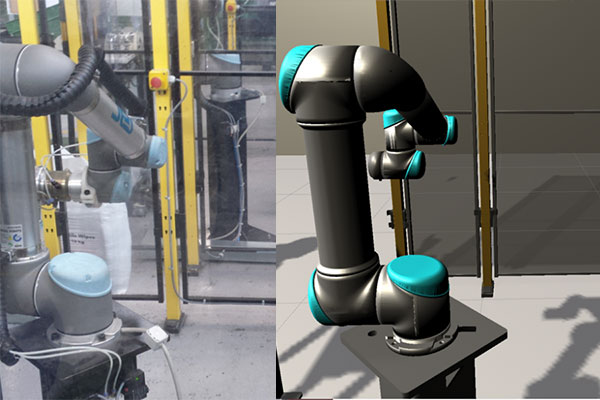
Assuring the safety of cobots

Flexible manufacturing
Towards regulatory change for cobots
Latest research papers
Here are the most recent papers based on research in the manufacturing domain from the York team and our demonstrators and Fellows. You can also view all of our research papers.
- Gleirscher, M., Calinescu, R., Douthwaite, J., Lesage, B., Paterson, C., Aitken, J., Alexander, R., and Law, J. "Verified synthesis of optimal safety controllers for human-robot collaboration" in Science of Computer Programming (April 2022).
- Eimontaite, I., Cameron, D., Rolph, J., Mokaram, S., Aitken, J.M., Gwilt, I., and Law, J. (2022). “Dynamic graphical instructions result in improved attitudes and decreased task completion time in human–robot co-working: An experimental manufacturing study”. Sustainability, 14,3289.
- Zhang, J., Wang, S., Wang, P., Mihaylova, L., and Law, J. “A vision data repository for human-UR10 robot interactions in manufacturing” (2022).
- Wang, S., Zhang, J., Wang, P., and Mihaylova, L. “Semi-automated labelme, a deep learning based annotation tool” (2022).
- Douthwaite, A., Lesage, B., Gleirscher, M., Calinescu, R., Aitken, J.M., Alexander, R., and Law, J. "A modular digital twinning framework for safety assurance of collaborative robotics" in Frontiers in Robotics and AI, December 2021.
Other resources
On the blog


Our other research domains
Learn what research is taking place in other domains that might be transferable to your work.