
Assistive robots in healthcare
How can robots and artificial intelligence be used safely to improve the quality of life and increase independent living in an ageing population?
The challenge
Assistive robots have the potential to provide support for a range of care-related tasks such as physical and social assistance, physiotherapy and rehabilitation. However, the close human-robot interaction (HRI) causes safety challenges.
As part of an Innovate UK funded project, the project team has developed CHIRON, a prototype modular overhead/ceiling robotic system that can provide physical and cognitive assistance to frail older adults. This demonstrator is investigating and evaluating the safety, regulatory and requirements of close HRI in unstructured domestic environments, utilising the CHIRON robotic system.
The research
The work is based around a series of experiments designed to validate a range of practical use-cases, derived from potential end-users, occupational and physiotherapists, paid carers and regulators, and potential commercial manufacturing partners.
The use-cases cover functionality and more generalisable HRI aspects such as adaptive and intelligent performance and multi-modal interaction, which will impact on safety relating to human factors, such as: trust, attention, perception, and learning.
The progress
“The PI, Praminda Caleb-Solly, has recruited a multidisciplinary team to develop a set of functional and non-functional requirements for physically assistive robots to provide mobility support. This work was followed up with a detailed use case analysis, using data from focus groups with domain experts in health and social care, and interviews with occupational therapists. These data have been carefully collected and analysed and provide a good foundation for future studies exploring physical human-robot interactions. I am very pleased to see the progress that has been made.” Professor Nigel Harris, Director of Innovation and Growth, West of England Academic Health Science Network. CEO Designability Charity 2009-2019
The team ran workshops with care providers in hospital and residential care settings, to better understand the issues associated with supporting people with a range of impairments. The outcomes were translated into use cases and scenarios and in combination with Environmental Survey Hazard Analysis (ESHA) have been transformed into a set of functional and safety requirements.
The team has been using the data collected from the CHIRON robot to develop a machine learning framework. They have developed some preliminary models which can detect the different transition states during a sit-to-stand activity and also detect the transition patterns of two different people.
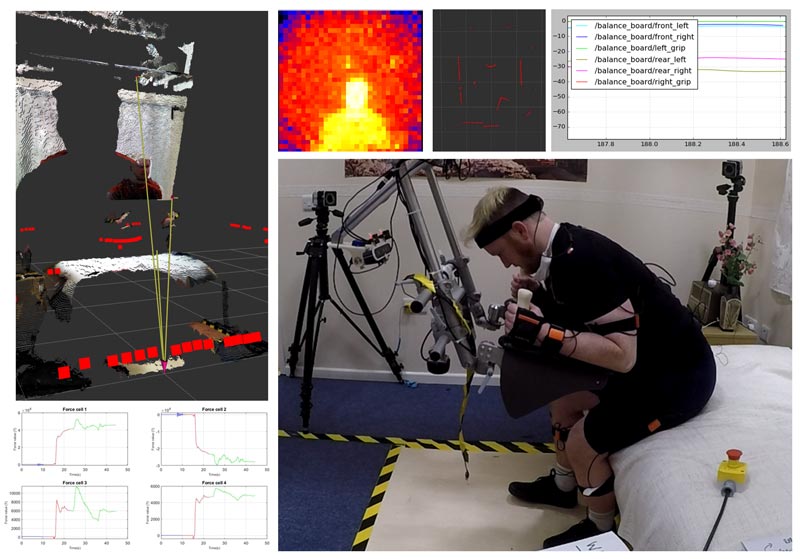
A compilation of the data from the sensors being used in the experiments with the CHIRON robot
A completed definition of a systems architecture model-based Distributed Adaptive Control (DAC) has also been completed. The DAC is a standard architecture reference model for autonomous systems which provides a template for identifying the functions of the robot to which machine learning can be applied.
The team has also run a number of seminars on their ESHA studies, both on the methodology and its application, and have been developing practical guidance to be published in the Body of Knowledge.
Currently the team is identifying the training needs for health and social care professionals who would work alongside healthcare robots for physical assistance. They are working with an Allied Health Professional and have devised a survey for health and social care professionals. This will provide insights into what additional knowledge and training are needed for emerging physically assistive robots in healthcare, as well as their concerns regarding safety. This will be used to draft the initial text for an industry safety standard for health/social care assistive robotics.
Presentations and papers
- March 2020 - a tutorial on Environmental Survey Hazard Analysis (ESHA) was presented at the European Robotics Forum in Malaga, Spain.
- February 2020 - poster presentation at Safety-Critical Systems Symposium. Using Task Analysis and Environmental Survey Hazard Analysis to identify requirements of autonomous systems (poster abstract), Chris Harper, Daniel Delgado Bellamy, Sanja Dogramadzi S., Praminda Caleb-Solly.
- February 2020 - poster presentation at Safety-Critical Systems Symposium. Safety Aspects of Complex Human-Robot Interaction in Healthcare Robotics (poster abstract), Daniel Delgado Bellamy, Chris Harper, Sanja Dogramadzi S.
- Praminda Caleb-Solly, Proc. 28th Safety-critical Systems Symposium, York UK, February 2020, ISBN 9781713305668, pp417-420
Project team
- Bristol Robotics Laboratory, University of West of England
- Designability Charity Ltd
Contact us
Assuring Autonomy International Programme
assuring-autonomy@york.ac.uk
+44 (0)1904 325345
Institute for Safe Autonomy, University of York, Deramore Lane, York YO10 5GH
Contact us
Assuring Autonomy International Programme
assuring-autonomy@york.ac.uk
+44 (0)1904 325345
Institute for Safe Autonomy, University of York, Deramore Lane, York YO10 5GH