School of Physics, Engineering and Technology

- School of Physics, Engineering and Technology
- Research and innovation
- Intelligent Systems and Nanoscience
- Projects
- Evolvable and adaptive hardware
Evolvable and adaptive hardware: projects
- Continuous online adaptation in many-core systems: from graceful degradation to graceful amelioration
- Self-repairing Hardware Paradigms based on Astrocyte-neuron Models (SPANNER)
- EPSRC Platform Grant: Bio-inspired Adaptive Architectures and Systems
- From Biology to Systems Engineering and Electronic Design
- An Extensible Architecture for Homeostasis in Electronic Systems
- Artificial Hormone-based Architecture for Adaptable Robots
- Using Evolutionary Computation to Design the Next Generation of Nano-CMOS Systems
- Cartesian Genetic Programming (CGP)
- Self-Assembling Origami Robots
Evolvable hardware offers much for the future of complex system design. Evolutionary techniques not only give the potential to explore larger solution spaces, but when implemented on hardware allow system designs to adapt to changes in the environment, including failures in system components. Our work spans several areas, including the design of fault-tolerant hardware, evolvable array-based architectures, custom ASIC solutions for intrinsic evolvable hardware, the use of computational development within evolvable hardware, and automatic design of next generation nano-CMOS systems.
Continuous online adaptation in many-core systems: from graceful degradation to graceful amelioration
![]()
Members: Doctor Gianluca Tempesti (PI) (York), Doctor Martin Trefzer (York), Professor Andy Tyrrell (York), Doctor Nizar Dahir (York), Doctor Pedro Campos (York), Professor Steve Furber (Manchester), Doctor Simon Davidson (Manchester), Doctor Indar Sugiarto (Manchester), Professor Bashir Al-Hashimi (Southampton), Doctor Geoff Merrett (Southampton)
Funded by: EPSRC (EP/L000563/1)
Partners: The University of Manchester, University of Southampton
Outline
Imagine a many-core system with thousands or millions of processing nodes that gets better and better with time at executing an application, “gracefully” providing optimal power usage while maximizing performance levels and tolerating component failures. Applications running on this system would be able to autonomously vary the number of nodes in use. The GRACEFUL project aims at investigating how such mechanisms can represent crucial enabling technologies for many-core systems.
Self-repairing Hardware Paradigms based on Astrocyte-neuron Models (SPANNER)
![]()
Members: Dr David Halliday, Prof Andy M. Tyrrell, Prof Jon Timmis
Funded by: EPSRC EP/N007050/1
Start Date: 1 October 2015 - 31 March 2019
The human brain is remarkable in its ability to self-repair, for example following stroke or injury. Such self-repair results from a range of distributed and fine-grained mechanisms which act in tandem to ensure that the neurones (the basic building blocks in the brain) continue to function in as close to a normal state as possible.
In contrast modern electronic systems design typically relies on a single controller or processor, which has very limited self-repair capabilities. There is a pressing need to progress beyond current approaches and look for inspiration from biology to inform electronic systems design.
Recent studies have highlighted that interactions between astrocytes (a type of glial cell) and neurones in the brain provide a distributed cellular level repair capability where faults that impede or stop neuronal firing can be repaired by a re-adjustment of the local weights of connections between neurones in the brain.
This project aims to exploit these recent findings and develop a new generation of self-repairing algorithms by taking inspiration from these results to design a new generation of “astro-centric” algorithms. To achieve this we will include components representing both neurones and astrocytes in our electronic systems and model the interactions between these in such a way as to capture the distributed repair capabilities seen in the biological system.
EPSRC Platform Grant: Bio-inspired Adaptive Architectures and Systems
Members: Prof AM. Tyrrell, Dr MA. Trefzer, Prof J. Timmis, Dr G. Tempesti
Funded by: EPSRC
Dates: October 2013 - September 2018
Overview
The ever-increasing complexity of highly integrated computing systems requires more and more complex levels of monitoring and control over the potentially large number of interacting resources available in order to manage and exploit them effectively. Technology innovations are driving device and systems design to consider, for example, a move from multi-core (2-10 cores) to many-core (hundreds-thousands of cores) and to design hybrid technology platforms. However, it is still neither obvious how these systems will be constructed architecturally nor how they will be controlled and programmed. Major issues related to these systems include reliability and online optimisation, as well as the efficient utilisation of these complex systems. The need for reliability in such systems is obvious, considering their size and the huge design and test efforts required to manage the increasing sensitivity to faults of next-generation technologies.
Here we will research into hardware and software systems whose designs are motivated by biological principles. The main activities will be in the design, evaluation and exploitation of such systems. This will concern the advancement of bio-inspired techniques to construct microelectronic systems of the future. This will cover the topology of such systems that will both be massively parallel and will be required to cope with unreliable components, such as the variability of devices resulting from the continuing reduction in feature size. The need for new manufacturing methods such as 3D fabrication and new materials such as molecular devices will be critical for the future of microelectronic system design and will form a significant part of this research.
Objectives
Our long-term objective is to apply biological mechanisms, that are proven to enable stable computation with unreliable components in new nano and/or molecular substrates, in such a way that their key features can be exploited to perform robust computation with a performance that can compete with traditional computing paradigms. We envisage achieving this goal in a number of steps including:
- the development of new methodologies using silicon as an affordable, accessible, state-of-the-art technology, and
- the integration of silicon with other (molecular) technologies in hybrid systems, thereby allowing the shift of more functionality to suitable alternative technologies .
The Platform Grant funding allows us flexibility to bring together current, distinct research threads, adapt to new, emerging areas of research, increase the effectiveness with which these are incorporated to achieve our long-term vision.
From Biology to Systems Engineering and Electronic Design
Members: Andy M. Tyrrell, Julian F. Miller, Martin A. Trefzer, Tuze Kuyucu
Funded by: EPSRC - EP/E028381/1
Dates: July 2007 - July 2010
Natural Development as an Inspiration for Electronic Design
The development of multicellular organisms from a single cell (zygote) is one of the most amazing mechanisms in biology. Without development, the complex multicellular organisms, such as humans, animals and plants, would not exist. While a single cell is a highly complex entity in itself, unicellular organisms are still vastly limited in the tasks they can achieve and are vulnerable to environmental threats. A multicellular organism, however, is capable of multi-tasking using division of labour among the cells, and is able to protect itself from environmental threats better than a unicellular organism would since the loss of a cell or few cells does not necessarily harm the organism as a whole. Hence, multicellularity is key to achieving complex and intelligent organisms capable of executing sophisticated behaviours and surviving harsh and changing environmental conditions.
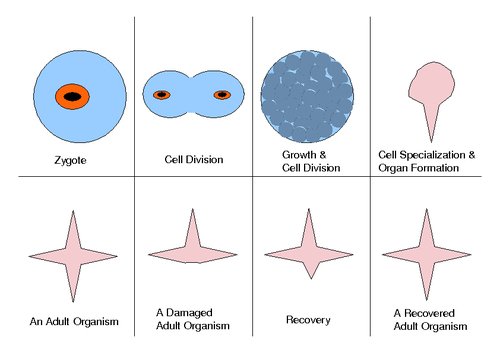
In biology, development is used to create a fully functional adult organism from a highly compressed piece of information-the genotype of an organism(ie the DNA)-that is stored within a single cell. Furthermore, development is also a mechanism that maintains the stability and functionality of an organism throughout its lifetime, and not merely a genotype-phenotype encoding mechanism in biology for creating complex multicellular organisms. Thanks to multicellular development an organism is capable of surviving damage and loss of its physical parts, which otherwise would be lethal to the organism.
Artificial Development and Unconstrained Evolution in Electronic Design
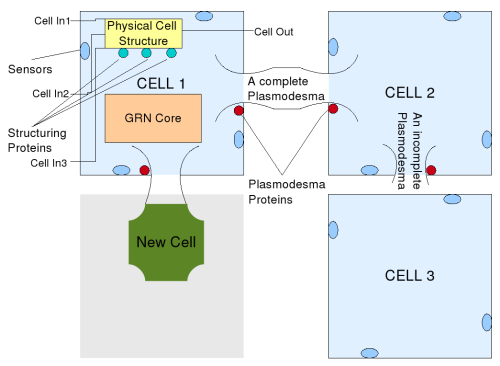
This project aims to create an artificial developmental system (ADS), which is capable of growing higher-level adaptable entities without human intervention. An unconstrained evolutionary algorithm (EA) is used to evolve the genetic code of a zygote (stem cell), which is then capable of growing into a multicellular organism. As the organism grows, cells specialise in performing particular tasks depending on their environment and thereby form "organs". Speaking in terms of hardware systems, a cell is represented by a configurable circuit unit that can perform various simple tasks. These circuit units can connect to each other and form sub-circuits (organs), and the sub-circuits are part of the organism (hardware system).
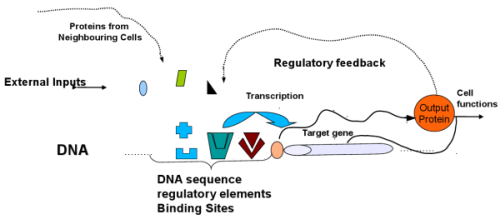
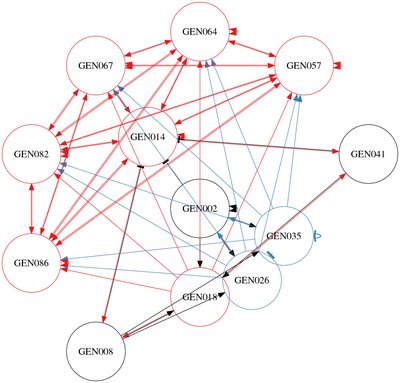
Unlike in hardware evolution experiments, where the configuration of a hardware substrate is directly evolved, a circuit building instruction set (similar to DNA) is evolved in the case of hardware development. The single instructions are called genes. Genes interact with each other through proteins, which can be considered as "actions" or "messages": a gene can activate/inhibit other genes, communicate with the environment or modify the underlying circuit structure. The complexity of interactions increases with the number of genes. As a consequence, in order to translate the "DNA" into a working and adaptive hardware system, a mechanism that is able to process this gene regulatory network (GRN) is being developed in this project.
Investigating Self-Repair and Adaptation
While "growth" can be viewed as a self-specifying decompressing process from genotype to phenotype (building an entire system from a compressed instruction set), it also allows another important property: self-repair. As in biological systems, the ability to (re-)grow is the key feature to be able to replace faulty or damaged parts. A stable developmental process should therefore be able to recover from errors and adapt to environmental changes even if it is not explicitly evolved for such behaviour. Such phenomena will be investigated in this project. This will have enormous ramifications on the production of future systems; reliability and fault tolerance of systems may be greatly improved under uncertain environmental conditions.


An Extensible Architecture for Homeostasis in Electronic Systems

Members: Andy Greensted, Nick Owens, Jon Timmis, Andy Tyrrell
Imagine an engineered system that can predict, or be aware of, imminent threats upon its specified operation. Then, based on this prediction, the system can alter its operation or configuration to circumvent the effects of the threat. The focus of the research is on one of the most impressive abilities of living organisms: their ability to ensure a reasonably stable internal state despite wildly changing external environmental factors. The project aim is to develop an architecture that endows electronic systems with the ability to self-regulate their physical and operational state within highly dynamic environments.
Artificial Hormone-based Architecture for Adaptable Robots
![]()
Members: Pitiwut Teerakittikul, Gianluca Tempesti and Andy Tyrrell
Start Date: January 2009
Downloads
Hormone-inspired Controller Structure for Adaptable Robots, Poster as PDF.
Overview
Adaptability is an essential ability of autonomous robots working in real-world human-hazardous environments. These kinds of environments are dynamic and full of unexpected circumstances caused by environmental changes. In fact, changes can happen in both internal (for example, faults occur on robot’s components or a reduction of robot’s power) and external systems (for example, changes of terrain characteristics or roughness) of the robots.
Homeostasis is a crucial property in helping maintain internal states of an organism. Generally, in biological organisms, when environmental changes occur which disturb internal states of an organism, homeostasis plays a vital role in helping re-balance the internal states of an organism, and assist an organism to cope with the changes. It is understood that there are three main systems responsible to homeostasis which are the nervous, immune and endocrine systems. Basically, the endocrine system can be viewed as a system of glands which secrete hormones in response to changes of environments and also helping other functions of an organism.
The main purpose of this research is to utilize artificial hormones in order to provide adaptability for an autonomous 4-wheel robot in such a way that it can cope with both internal and external environmental changes.
Gazebo – 3D Robot Simulator
Our robot, environment and control models are implemented in Gazebo, an open-source 3D physically-realistic robot simulator. This simulator is developed under the Player and Stage projects. Gazebo is able to simulate both static and dynamic objects, such as robots or sensors and the rigid-body physics of robots, sensors, objects and interactions among them in simulated environments. Gazebo is a powerful tool for implementation of autonomous robot systems.
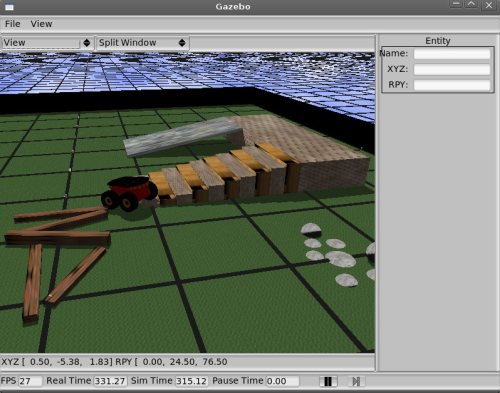
An example of a Gazebo environment
First Experiments
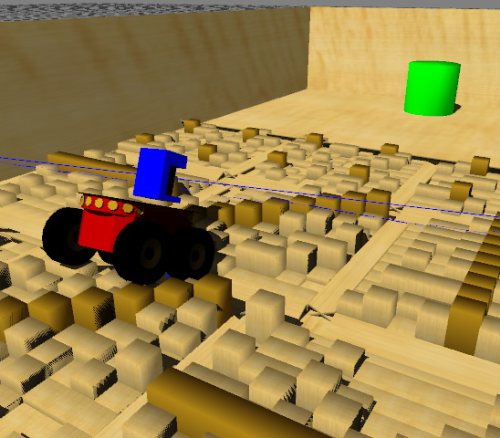
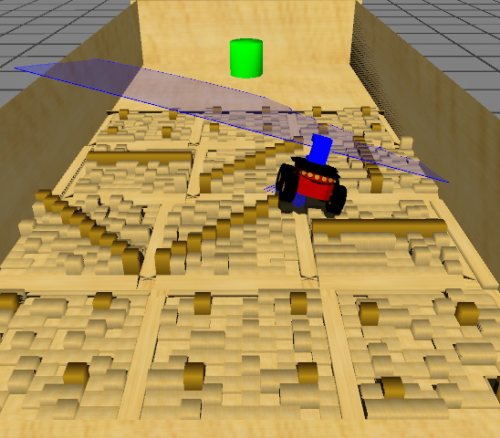
The main purpose of this experiment is to investigate the use of a hormone in helping a 4-wheel autonomous robot to negotiate a rough terrain which is an example of external environmental change.
Experimental setup
The autonomous robot is released in a rough terrain arena, as shown in the pictures above. The robot is expected to approach a targeted objected, in this case a green cylinder, while also negotiating rough terrain along the way.
A basic hormone responding to terrain roughness is used here on the robot. A greater degree of the terrain roughness causes the hormone concentration to increase, which then results in gradual decrease of the robot velocity.
First results
We have observed from first results that a number of robot’s tip-over rate is decreasing and the robot have shown a better performance in negotiating the terrain. Videos below show examples of robot behaviours when there is and there is no hormone implemented on the robot.
First video: when there is no hormone on the robot system
Second video: when there is hormone on the robot system
Using Evolutionary Computation to Design the Next Generation of Nano-CMOS Systems
Members: Andy Tyrrell, James Alfred Walker, James Hilder
Dates: October 2006 - October 2010
Project Description
Progressive scaling of CMOS transistors, as tracked by the International Technology Roadmap for Semiconductors (ITRS) and captured in Moore’s law, has driven the phenomenal success of the semiconductor industry, delivering larger, faster and, cheaper circuits. Silicon technology has now entered the nano-CMOS era with 40 nm MOSFETs already in mass production and sub-10 nm transistors scheduled for production by 2018.
However the years of ‘happy scaling’ are over and the fundamental challenges that the semiconductor industry faces, at both technology and device level, will impinge deeply upon the design of future integrated circuits and systems.
EPSRC in collaboration with leading design houses, chip manufacturers and ECAD vendors is funding a £5.3M project which will apply e-Science and Grid technology to tackle some of the fundamental challenges facing nano-CMOS design. The work at York will study the impact of next generation technologies, and related parameter fluctuations, on the design of digital circuits using evolutionary computation.
Academic Partners
University of Glasgow
University of Edinburgh
- Neural Networks Group
University of Manchester
University of Southampton
- Electronic Systems Design Group
University of York
- National e-Science Centre
- Intelligent Systems Group
Industrial Partners
Cartesian Genetic Programming (CGP)
Members: Julian Miller, Steve Smith, David Halliday, Andy Tyrrell, Tim Clarke, Janet Clegg, Michael Lones, James Alfred Walker, Martin Trefzer, James Hilder, Tuze Kuyucu, Gul Muhammad Khan, Katharina Voelk
Website: cartesiangp.co.uk
Start Date: October 2003
CGP Overview
CGP was originally developed by Julian Miller and Peter Thomson for the purpose of evolving digital circuits. It represents a program as a directed graph (that for feed-forward functions is acyclic). The benefit of this type of representation is that it allows the implicit re-use of nodes, as a node can be connected to the output of any previous node in the graph, thereby allowing the repeated re-use of sub-graphs. This is an advantage over tree-based GP representations where identical sub-trees have to be constructed independently. The CGP technique shares some similarities with Riccardo Poli's Parallel Distributed GP, as the techniques were independently developed at the same time. Originally, CGP used a program topology defined by a rectangular grid of nodes with a user defined number of rows and columns. However, later work by Tina Yu and Julian Miller showed that it was more effective when the number of rows is chosen to be one.
In CGP, the genotype is a fixed length representation consisting of a list of integers which encode the function and connections of each node in the directed graph. However, CGP uses a genotype-phenotype mapping that does not require all of the nodes to be connected to each other, this results in the program (phenotype) being bounded but having variable length. Thus there may be genes that are entirely inactive, having no influence on the phenotype, and hence the fitness. Such inactive genes therefore have a neutral effect on genotype fitness. This phenomenon is often referred to as neutrality. The influence of neutrality in CGP has been investigated in detail by Julian Miller, Vesselin Vassilev, and Tina Yu, and has been shown to be extremely beneficial to the efficiency of evolutionary process on a range of test problems.
CGP Extensions
The following extensions to CGP have been developed by members of the Intelligent Systems Group:
- Embedded and Modular CGP (James Walker and Julian Miller) allows the automatic acquisition, evolution and re-use of subroutines in CGP and has been shown to improve the performance of the technique on modular problems.
- Multi-chromosome CGP (James Walker and Julian Miller) allows the decomposition of a large multiple output problem into a series of smaller single output problems. This has the affect of reducing the complexity of the problem and making it easier to solve.
- Real-valued CGP (Janet Clegg, James Walker and Julian Miller) incorporates ideas from real-valued Genetic Algorithms with CGP. This introduces a real-valued genotype and an extra level of neutrality into the CGP representation, and also a crossover operator which appears to be beneficial to evolution.
- Implicit-context CGP (Steve Smith and Michael Lones) introduces implicit context representation to CGP, a concept which was first developed in our work on the enzyme genetic programming system, and which enables positional independence and improved recombination.
- Self-modifying CGP (Julian Miller and Simon Harding) is a developmental form of CGP which allows the phenotype to change over time using a series of iterative self-modification operations.
Applications of CGP
CGP and the extensions to CGP have also been applied to a number of applications within the Intelligent Systems Group.
- Evolving Helicopter Flight Controllers (Tim Clarke, Julian Miller and Omar Hobohm)
- Co-evolving Neuro-developmental Programs for Playing Checkers (Julian Miller, David Halliday and Gul-muhammad Khan)
- Evolving Multiple CGP Networks for the Analysis of Mammograms (Steve Smith and Katharina Voelk)
- Evolving Portrait Painters (Julian Miller, James Walker and Steve DiPaola)
- Evolving Classification Systems for Processing Medical Data (Steve Smith and Michael Lones)
Self-Assembling Origami Robots
Members: University of York; MIT
Website: Microrobotics Group
Dates: 2012 - present
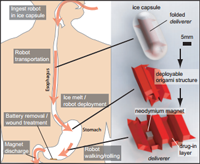
This project demonstrates a new approach to configure a miniature origami robot that folds up on the spot, accomplishes tasks, and disappears by degradation.
https://www.youtube.com/watch?v=f0CluQiwLRg
Publications
Miyashita, S., Guitron, S., Yoshida, K., Li, S., Damian, D. D., and Rus, D. (2016) Ingestible, Controllable, and Degradable Origami Robot for Patching Stomach Wounds, IEEE International Conference on Robotics and Automation (ICRA), pp. 909-916 | Preprint PDF (2M)
Miyashita, S., Guitron, S., Ludersdorfer, M., Sung, C., and Rus, D. (2015) An Untethered Miniature Origami Robot that Self-folds, Walks, Swims, and Degrades, IEEE International Conference on Robotics and Automation (ICRA), pp. 1490-1496, Seattle, USA | Preprint PDF (4.2M)
Miyashita, S., DiDio, I., Ananthabhotla, I., An, B., Sung, C., Arabagi, S., and Rus, D. (2015) Folding Angle Regulation by Curved Crease Design for Self-Assembling Origami Propellers. ASME Journal of Mechanisms and Robotics. | Preprint PDF
Miyashita, S., Meeker L., Tolley, T. M., Wood, J. R., and Rus, D. (2014) Self-Folding Miniature Elastic Electric Device. The IOP Journal Smart Materials and Structures, 23 094005, doi:10.1088/0964-1726/23/9/094005 | Preprint PDF
Miyashita, S., Meeker, L., Goldi, M., Kawahara, Y., and Rus, D. (2014) Self-Folding Printable Elastic Electric Devices: Resistor, Capacitor, and Inductor. IEEE International Conference on Robotics and Automation (ICRA), pp. 1446-1453, Hong Kong | Preprint PDF
Miyashita, S., Onal, D. C., and Rus, D. (2013) Self-pop-up Cylindrical Structure by Global Heating, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4065-4071, Tokyo, Japan.