School of Physics, Engineering and Technology

- School of Physics, Engineering and Technology
- Research and innovation
- Intelligent Systems and Nanoscience
- Projects
- Collective and autonomous robotics
Collective Adaptive Systems : Theory and Design: Projects
- RoboFish: Autonomous Biomimetic Robot-fish for Offshore Wind Farm Inspection
- MOSAR: Modular Satellites for Assembly and Reconfiguration
- Modular e-puck Extension
- CoCoRo : Collective Cognitive Robots
- Robotic Sniffer Dog Project
- SYMBRION: Symbiotic Robotic Organism
- ARTIST: A Network for Artificial Immune Systems
- Immune System Based Fraud and Fault Sensor System
- Self-Assembling Micro/Milli Robots
- Tribolon: Scalable Self-Assembling Robot
Collective adaptive systems consist of many autonomous units that interact in a variety of ways over multiple scales. We focus our work primarily on swarm robotic systems, developing novel approaches to self-healing systems: endowing collectives with the ability to detect, diagnose and repair failures for themselves. We draw heavily from the field of Artificial Immune Systems (AIS): techniques inspired by the workings of the immune system and also multi-agent systems. We make use of a variety of robotic platforms, from ground-based, to aerial to underwater robots and have work within a state of the art purpose built robotics laboratory.
RoboFish: Autonomous Biomimetic Robot-fish for Offshore Wind Farm Inspection
Member: Dr Mark A. Post
Funded by: EPSRC Supergen Hub
Project Time: 2019-2020
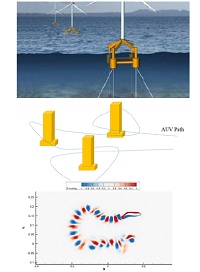
RoboFish is an autonomous, bio-mimetic AUV capable of navigation about dense and moving underwater structures for the propose of continuously and autonomously locating and monitoring structural damage to Offshore Renewable Energy infrastructure such as floating wind farms. The project is funded by the Supergen ORE Hub, and partners in this project are University of Strathclyde, PicSea Ltd, East Coast Oil and Gas Engineering Ltd.
Papers: TBD
MOSAR: Modular Satellites for Assembly and Reconfiguration

Member: Dr Mark A. Post
Funded by: EU H2020
Project Time: 2019-2021
About: Self-configuring modular robots have the potential to revolutionize the way that tasks can be done autonomously and adaptively. One key application is in modular satellites, which can be re-configured and re-supplied with new function-specific modules to replace old or faulty ones without the risk and waste of de-orbiting the entire satellite. This project aims to extend the MOSAR (MOdular Satellite Assembly and Reconfiguration) Space Robotics SRC project with the capability, based on intelligent semantic reasoning, for a modular satellite to “know” its own capabilities and how to re-configure them to achieve science and industrial goals in orbit without human intervention.
Paper: Knowledge-based self-reconfiguration and self-aware demonstration for modular satellite assembly
Modular e-puck Extension

Members: Lachlan Murray, Jon Timmis, Andy Tyrrell
Funded by: EU
Start Date: January 2012
About
The modular e-puck extension is a structural extension for the e-puck robot, that transforms what is traditionally a swarm robotics platform into a self-reconfigurable modular robotic system.
This webpage provides access to videos of the extension in use, a list of publications that feature the extension, and links to the resources necessary for manufacturing the extension yourself.
Videos
Environment Driven Self-reconfiguration
A demonstration of environment driven self-reconfiguration, using the modular e-puck extension
https://www.youtube.com/watch?v=x47LqcEaTJA
Future Work
A video of some of the ongoing and future work to be carried out with the modular e-puck extension
https://www.youtube.com/watch?v=F3Gn6zOE7JU
Collective Locomotion
Groups of two, three and four robots demonstrating collective locomotion with the modular e-puck extension
https://www.youtube.com/watch?v=5l4AdxvnGcM
Self-assembly
Three modules equipped with the modular e-puck extension, performing collective self-assembly (6x speed)
https://www.youtube.com/watch?v=1_WVtIVy9i4
Stationary Alignment
A video demonstrating two different approaches to stationary alignment using the modular e-puck extension
https://www.youtube.com/watch?v=Qa5uTqh0SCA
Two Module Collective Locomotion
Two modules equipped with the modular e-puck extension, performing collective locomotion with obstacle avoidance (6x speed)
https://www.youtube.com/watch?v=d-n0Po7U9FA
Three Module Collective Locomotion
Three modules equipped with the modular e-puck extension, performing collective locomotion with obstacle avoidance (6x speed)
https://www.youtube.com/watch?v=8MmUQpHFKSo
Four Module Collective Locomotion
Four modules equipped with the modular e-puck extension, performing collective locomotion with obstacle avoidance (6x speed)
https://www.youtube.com/watch?v=pWL2JS6aTiM
Downloads
The designs for the modular e-puck extension are available under the Creative Commons Attribution-NonCommercial 3.0 Unported License.
The parts have been successfully printed on a MakerBot Thing-O-Matic 3D printer. For the highest quality results, when utilising other forms of rapid prototyping, minor alterations to the designs may be required.
To assemble the complete extension, three 15mm hexagonal spacers, three M2 12mm set screws, and eight 6x2mm Neodymium disc magnets are required.

Publications
Self-reconfigurable Modular e-pucks
Lachlan Murray, Jon Timmis and Andy Tyrrell
Proceedings of the 8th International Conference on Swarm Intelligence, ANTS, (2012).
Abstract: We present the design of a new structural extension for the e-puck mobile robot. The extension may be used to transform what is a swarm robotics platform into a self-reconfigurable modular robotic system. As a proof of concept, we present an algorithm for controlling the collective locomotion of a group of e-pucks that are equipped with the extension. Our approach proves itself to be an effective method of coordinating the movement of a group of physically connected e-pucks. Furthermore, the system shows robustness in its ability to self-reconfigure and self-assemble following a disruption which alters the group's structure.
CoCoRo : Collective Cognitive Robots
![]()
Members: Jon Timmis, Andy Tyrrell, Mark Read, James Hilder
Funded by: EU Framework Programme 7
Start Date: April 2011
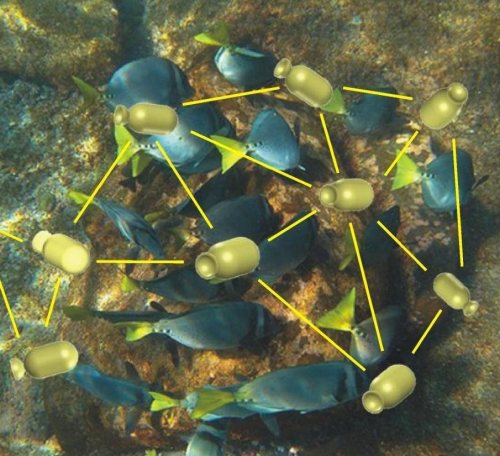
CoCoRo is an ambitious project which aims at creating a swarm of interacting, cognitive, autonomous robots. We will develop a swarm of autonomous underwater vehicles (AUVs) that are able to interact with each other and which can balance tasks (interactions between/within swarms). These tasks are: ecological monitoring, searching, maintaining, exploring and harvesting resources in underwater habitats. The swarm will maintain swarm integrity under conditions of dynamically changing environments and will therefore require robustness and flexibility. This will be achieved by letting the AUVs interact with each other and exchange information, resulting in a cognitive system that is aware of its environment, of local individual goals and threats and of global swarm-level goals and threats. By a combination of locally acting and globally acting self-organizing schoals, information from the global level flows into the local level and influences the behaviour of individual AUVs. Such a cognitive-based scheme creates a very fast reaction of the whole collective system when optimizing the global performance. As shown by natural swimming fish schoals, such mechanisms are also flexible and scalable. In this way we explore several general principles of swarm-level cognition and can assess their importance in real-world applications. The following scientific questions are to be targeted in the project:
- Can collective cognition be generated as a distributed mechanism without centralized control?
- Is such a collective cognition capable to increase the efficiency of the collective and to increase the robustness of the collective?
- Can such a system of collective cognition be generated from scratch? (Artificial evolution or similar technologies?)
- Can complexity be built from (mathematical) building blocks? Do these building blocks deliver additional complexity "for free"?
- Can simple interacting agents support the emergence a common pre-consciousness; can it evolve from simple to complex?
- Can local interacting agents support the emergence of a global order parameter (in sense of synergy), which in turn enslaves all these local agents?
CoCoRo is an EU-funded (Framework Programme 7) STREP project with a consortium of five Universities participating, including the Universities of Graz, Stuttgart, Brussels and SSCI (Piza). At York, the key focal areas of research will be the use of Artificial Immune System inspired algorithms and development of a fault-tolerant operating system for the platform.
Robotic Sniffer Dog Project

Members: Jon Timmis, Andy Tyrrell, James Hilder, Nick Owens
Funded by: DSTL
Start Date: January 2010
The Robotic Sniffer Dog project is a project funded by DSTL which attempts to improve the accuracy and reliability of automatic chemical agent detection using a robotic platform. The project was initial funded due to the success of the Receptor Density Algorithm (RDA), an immune-inspired algorithm developed by Doctor Nick Owens as part of his PhD research project, at detecting anomalies within a Proton-Transfer Reaction Mass Spectrometry data-set in a competition organised by DSTL at the ICARIS 2009 Conference. The RDA is inspired by the signalling mechanisms found within T-cells, and is developed from models of the immunological T-cell and the T-cell report's ability to contribute to T-cell discrimination.
Following the successful competition results seen by the RDA, DSTL funded three short work-periods with the goal of adapting the RDA to be used on an embedded robotic platform. The sensor used was a Smith's Detection CAM device, mounted on a Pioneer 4AT 4-wheeled robot. The platform was navigated across a noisy environment and successfully discriminated the target substance, aerosol-based Deep Heat, from a number of other VOCs.
Further work was then carried out which allows the automatic optimisation of RDA parameters for different sensors and environments, with efforts made to accelerate the process through the use of GPGPU acceleration using NVidia's CUDA programming language. Funding has now been allocated for a single 3-year PhD studentship to further the project, enhancing the algorithm and using new sensors and the group's new 4-wheel off-road Jaguar robotic platform.
Paper: Parameter Optimisation in the Receptor Density Algorithm James A. Hilder, Nick D. L. Owens, Peter J. Hickey, Stuart N. Cairns, David P. A. Kilgour, Jon Timmis and Andy Tyrrell (Artificial Immune Systems, Lecture Notes in Computer Science, 2011, Volume 6825/2011)
An Extensible Architecture for Homeostasis in Electronic Systems

Members: Andy Greensted, Nick Owens, Jon Timmis, Andy Tyrrell
Imagine an engineered system that can predict, or be aware of, imminent threats upon its specified operation. Then, based on this prediction, the system can alter its operation or configuration to circumvent the effects of the threat. The focus of the research is on one of the most impressive abilities of living organisms: their ability to ensure a reasonably stable internal state despite wildly changing external environmental factors. The project aim is to develop an architecture that endows electronic systems with the ability to self-regulate their physical and operational state within highly dynamic environments.
Artificial Hormone-based Architecture for Adaptable Robots
![]()
Members: Pitiwut Teerakittikul, Gianluca Tempesti and Andy Tyrrell
Start Date: January 2009
Overview
Adaptability is an essential ability of autonomous robots working in real-world human-hazardous environments. These kinds of environments are dynamic and full of unexpected circumstances caused by environmental changes. In fact, changes can happen in both internal (for example, faults occur on robot’s components or a reduction of robot’s power) and external systems (for example, changes of terrain characteristics or roughness) of the robots.
Homeostasis is a crucial property in helping maintain internal states of an organism. Generally, in biological organisms, when environmental changes occur which disturb internal states of an organism, homeostasis plays a vital role in helping re-balance the internal states of an organism, and assist an organism to cope with the changes. It is understood that there are three main systems responsible to homeostasis which are the nervous, immune and endocrine systems. Basically, the endocrine system can be viewed as a system of glands which secrete hormones in response to changes of environments and also helping other functions of an organism.
The main purpose of this research is to utilize artificial hormones in order to provide adaptability for an autonomous 4-wheel robot in such a way that it can cope with both internal and external environmental changes.
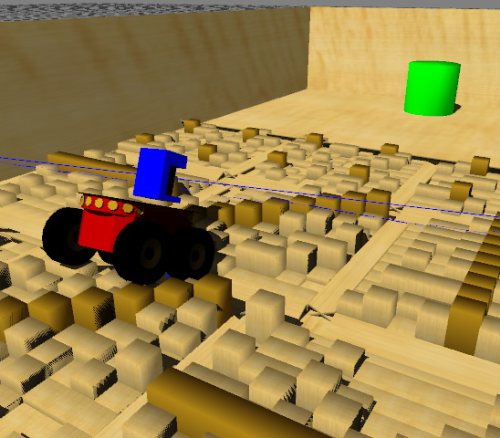
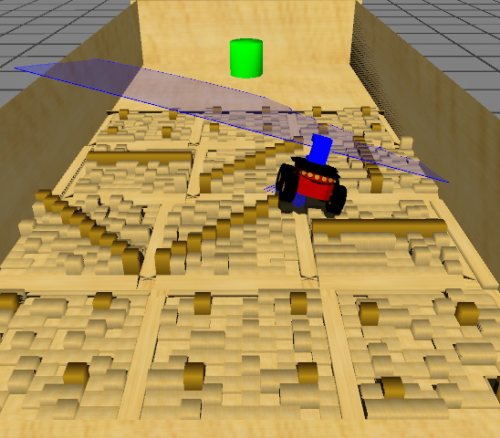
Gazebo – 3D Robot Simulator
Our robot, environment and control models are implemented in Gazebo, an open-source 3D physically-realistic robot simulator. This simulator is developed under the Player and Stage projects. Gazebo is able to simulate both static and dynamic objects, such as robots or sensors and the rigid-body physics of robots, sensors, objects and interactions among them in simulated environments. Gazebo is a powerful tool for implementation of autonomous robot systems.
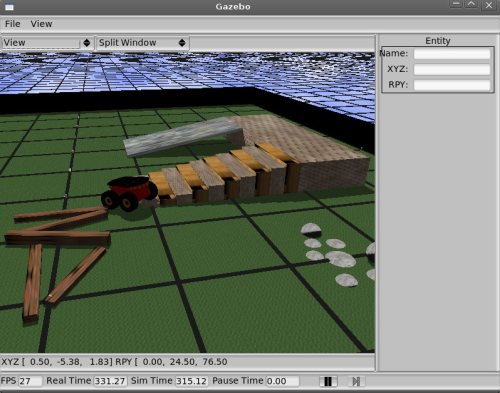
An example of a Gazebo environment
First Experiments
The main purpose of this experiment is to investigate the use of a hormone in helping a 4-wheel autonomous robot to negotiate a rough terrain which is an example of external environmental change.
Experimental setup
The autonomous robot is released in a rough terrain arena, as shown in the pictures above. The robot is expected to approach a targeted objected, in this case a green cylinder, while also negotiating rough terrain along the way.
A basic hormone responding to terrain roughness is used here on the robot. A greater degree of the terrain roughness causes the hormone concentration to increase, which then results in gradual decrease of the robot velocity.
First results
We have observed from first results that a number of robot’s tip-over rate is decreasing and the robot have shown a better performance in negotiating the terrain. Videos below show examples of robot behaviours when there is and there is no hormone implemented on the robot.
First video: when there is no hormone on the robot system
Second video: when there is hormone on the robot system
SYMBRION: Symbiotic Robotic Organism

Members: Jon Timmis, Andy Tyrrell, Maizura Mokhtar, Ran Bi
Start Date: June 2008
The main focus of this project is to investigate and develop novel principles of adaptation and evolution for symbiotic multi-robot organisms based on bio-inspired approaches and modern computing paradigms. Such robot organisms consist of super-large-scale swarms of robots, which can dock with each other and symbiotically share energy and computational resources within a single artificial-life-form. When it is advantageous to do so, these swarm robots can dynamically aggregate into one or many symbiotic organisms and collectively interact with the physical world via a variety of sensors and actuators. The bio-inspired evolutionary paradigms, combined with robot embodiment and swarm-emergent phenomena, enable the organisms to autonomously manage their own hardware and software organisation. In this way, artificial robotic organisms become self-configuring, self-healing, self-optimising and self-protecting from both hardware and software perspectives. This leads not only to extremely adaptive, evolvable and scalable robotic systems, but also enables robot organisms to reprogram themselves without human supervision and for new, previously unforeseen, functionality to emerge. In addition, different symbiotic organisms may co-evolve and cooperate with each other and with their environment.
ARTIST: A Network for Artificial Immune Systems
Members: Jon Timmis, Andy Tyrrell
The field of Artificial Immune Systems (AIS) is a new and exciting area of research, whose implications to the design and implementations of systems in the future are manifold. This is not limited to the obvious virus detection in computer systems, but could extend from fault-tolerant hardware design to machine learning. However, to allow this new area to develop and for the UK to continue to lead the world in such activities, a more structured approach is needed to co-ordinate and support researchers in this area. This network is designed to help bolster these researchers in the UK, stimulate and extend the community of AIS practitioners within the UK, and provide the necessary infrastructure and financial support for them to pursue further interactions between themselves and international collaborators in order to drive forward this area of research.
Immune System Based Fraud and Fault Sensor System

Members: Jon Timmis, Adam Knowles and Rogerio De Lemos (Kent)
There is currently increased public awareness regarding the potential for fraud in financial services, especially with respect to well-publicised ATM fraud attacks. This has lead to an increased requirement for additional sensing in the ATM to detect these types of attack. This requires intelligence to be built into the system to allow more efficient processing of the new complex data that is available in the ATM. The intelligence uses “sensor fusion” to amalgamate the data and process it to produce more accurate alarm messages to the ATM network control system. This project aims to provide the intelligence for the processing of the sensor data allowing the raw data to be converting into more accurate and complete alarm messages that can be passed into the management and fraud detection systems. This project is in collaboration with NCR (http://www.ncr.com) and Rogerio De Lemos of the Computing Laboratory at The University of Kent (http://www.cs.kent.ac.uk/people/staff/rdl).
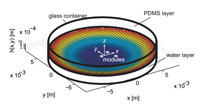
Self-Assembling Micro/Milli Robots
Members: Carnegie Mellon University
Website: Microrobotics Group
Dates: 2011 - 2012
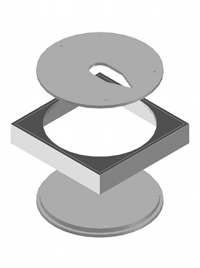
In this project, we realized magnet based self-assembly micro-robots. We developed a remotely-applicable magnetic switch mechanism and realized targeted reconfiguration with four floating micro-modules. By using multiple magnetic materials, we achieve differential inter-modular interactions, regulated by externally applied magnetic fields. The technique features both molecular-inspired bottom-up approach and top-down engineering control approach.
Publications
Miyashita, S., Diller, E., and Sitti, M. (2013) Two-Dimensional Magnetic Micro-Module Reconfigurations Based on Inter-Modular Interactions. International Journal of Robotics Research, 32, 591-615 | Preprint PDF
Diller, E., Miyashita, S., and Sitti, M. (2012). Wirelessly Addressable Magnetic Composite Micropumps. RSC Advances. 2 (9), 3850-3856 | Preprint PDF
Diller, E., Miyashita, S., and Sitti, M., Magnetic Hysteresis for Multi-State Addressable Magnetic Microrobotic Control. (2012) In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Algarve, Portugal, October, pp. 2325-2331. (Acceptance rate: 45%) | Preprint PDF
Tribolon: Scalable Self-Assembling Robot
Website: Microrobotics Group
The goal of this project is to design "mechanical reactions" with non-molecular entities. The paper (J. Royal Soc. Interface) presents that "catalysis is possible with a non-molecular entity", also addressing the design principle.
Publications
Miyashita, S., Audretsch, C., Nagy, Z., Fuchslin, R., and Pfeifer, R. (2015) Mechanical Catalysis on the Centimeter Scale. Journal of the Royal Society Interface. 12: 20141271 | PDF | .stl files
Miyashita, S. (2011) Effect of Morphology on Scalable Self-Assembling Robots -in Pursuit of Living Artificial Systems-. Ph.D. thesis, University of Zurich.
Miyashita, S., Goldi, M., and Pfeifer, R. (2011). How reverse reactions influence the yield rate of stochastic self-assembly. International Journal of Robotics Research, 30, 627-641 | Preprint PDF
Miyashita, S., Casanova, F., Lungarella, M., and Pfeifer, R. (2008) Peltier-Based Freeze-Thaw Connector for Waterborne Self-Assembly Systems. IEEE International Conference on Intelligent Robots and Systems (IROS), 1325-1330