Safety of shared control in autonomous driving (Safe-SCAD)
How do humans and machines safely share control of an autonomous car?
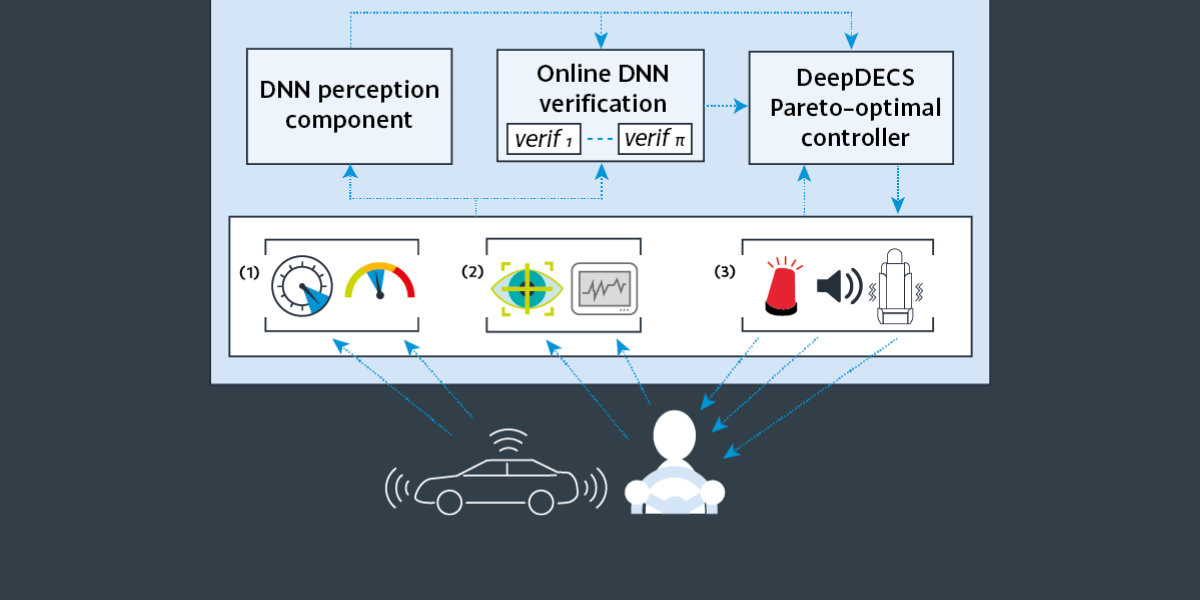
The Safe-SCAD project developed a proof-of-concept driver attentiveness management system to support safe shared control of autonomous vehicles. This system comprises a deep neural network (DNN) responsible for predicting the driver control-takeover behaviour, methods for verifying this DNN, and a discrete-event controller that issues optical, acoustic and/or haptic driver alerts based on the predictions of the DNN and the results of its online verification.
Contact us
Assuring Autonomy International Programme
assuring-autonomy@york.ac.uk
+44 (0)1904 325345
Institute for Safe Autonomy, University of York, Deramore Lane, York YO10 5GH

Project report
The full project report describes the development and integration of the SafeSCAD components and the testing of the SafeSCAD solution.
The challenge
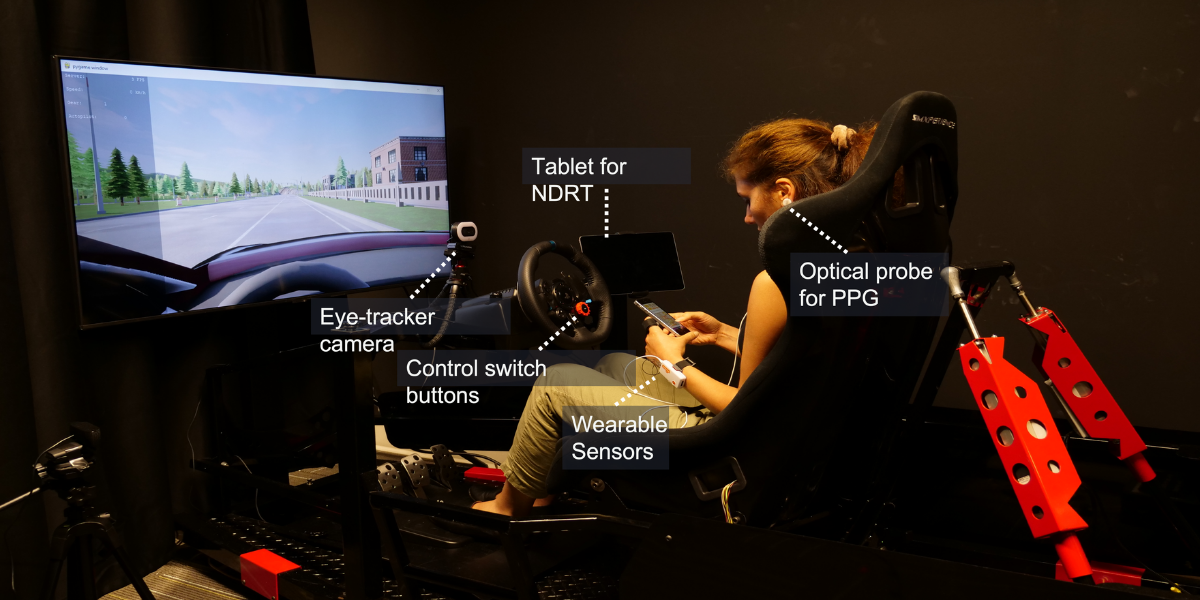
Drivers find it very challenging to remain attentive when in charge of vehicles with automated driving systems. How can we measure and map a safety driver’s level of situational awareness while they’re not in control of the vehicle, in order to safely hand-back control to the human?
The research
The team developed a novel DNN-based framework that predicts driver takeover behaviour (e.g. takeover reaction time) to ensure that a driver is able to safely take over the control when engaged in non-driving tasks. They investigated formal analysis techniques for neural networks whose results can feed directly into the system-level design of autonomous systems, and applied them to the DNN developed by the project, to quantify its aleatory uncertainty.
An approach that takes this uncertainty into account in the implementation of conventional software controllers for autonomous systems was then developed. This approach to controller synthesis provides formal guarantees that the autonomous system complies with key safety and performance requirements despite using a deep-learning component to perceive its environment. The DNN, the formal analysis techniques, and the controller synthesis approach devised by the project were used to prototype an autonomous system for maintaining driver attentiveness in shared-control autonomous driving through issuing optical, acoustic and haptic driver alerts as required when driver attention is unacceptably low.
The results
You can read about all of the results from the project in the final project report. The main results are that the project:
- created a proof-of-concept solution that can be integrated into the future design of shared-control automated vehicles, to facilitate human-system interaction, making it safer and more natural and efficient.
- outlined formal analysis techniques for neural networks that can be used to quantify the aleatory uncertainty of multiclass DNN classifiers within the operational design domain of their autonomous systems.
- demonstrated the use of a combination of design-time and online verification of neural networks to synthesise conventional controllers guaranteed to satisfy key safety, dependability and performance requirements of an autonomous system, and to be Pareto optimal with respect to a set of optimisation criteria.
How can the verification of neural networks and of traditional software components be combined to provide assurance evidence for systems comprising both types of components?
- Calinescu, R., Imrie, C., Mangal, R., Pasareanu, C., Santana, M.A., and Vázquez, G. "Discrete-event controller synthesis for autonomous systems with deep-learning perception components". Available on Arxiv (February 2022).
- Calinescu, R. "Verification under uncertainty: probabilistic, parametric, confidence-interval, and statistical model checking" at UKRI Trustworthy Autonomous Systems seminar, 22 April 2021. (YouTube recording)
- Paterson, C., Haoze W., Grese, J., Calinescu, R., Păsăreanu, C.S., and Barrett, C. "DeepCert: Verification of Contextually Relevant Robustness for Neural Network Image Classifiers" in International Conference on Computer Safety, Reliability, and Security, pp. 3-17. Springer, Cham, 2021.
- Păsăreanu, C. "Analysis of neural network takeover-time predictions for shared-control autonomous driving" in VARS '21: Proceedings of the 1st International Workshop on Verification of Autonomous & Robotic Systems, May 2021
- Calinescu, R. Alasmari, N., and Gleirscher, M. "Maintaining driver attentiveness in shared-control autonomous driving" presented at 2021 International Symposium on Software Engineering for Adaptive and Self-Managing Systems (SEAMS).
- Pakdamanian, E., Sheng, S., Baee, S., Heo, S., Kraus, S., Feng, L. "DeepTake: Prediction of Driver Takeover Behavior using Multimodal Data" at the ACM Conference on Human Factors in Computing Systems (CHI) 2021
- Grese, J.M., Pasareanu, C., Pakdamanian, E. "Formal Analysis of a Neural Network Predictor in Shared-Control Autonomous Driving" presented at AIAA Scitech 2021 Forum.
Project partners
- Dr Lu Feng (principal investigator) University of Virginia
- Dr Corina Pasareanu (co-investigator) Carnegie Mellon University
- Professor Radu Calinescu (co-investigator) University of York
Contact us
Assuring Autonomy International Programme
assuring-autonomy@york.ac.uk
+44 (0)1904 325345
Institute for Safe Autonomy, University of York, Deramore Lane, York YO10 5GH