1.2.1 Considering human/machine interactions
Practical guidance - manufacturing
Authors: Giuseppe Fogliazza, Luigi Calegari, Adriano Scibilia, Nicola Pedrocchi (RECOLL demonstrator project)
When the human interaction with the RAS is analysed, the first assumption is that increasing the interaction level may introduce hazards. It is therefore important to consider the necessary interactions between the RAS and the human being (whether it is a system operator or a third party in the same environment of the RAS).
The RECOLL project application deals with the management of complex workflows where humans and robots have different skills and roles. The approach followed in RECOLL has been led by the ISO1028/TS15066 [1-3]. The project addressed both fully automated (safeguarded) work cells and entirely manual actions in machining pallet manipulation. The assistive collaborative robot is placed inside the same manual station where the workers perform assembly/disassembly tasks. A substantial impact on current practice through the introduction of collaborative robotics is expected in the following ways:
- the workspace is jointly occupied by the robot, and the access to the operating position is reduced. Frequent proximity conditions to a large robot require a transition period to familiarise with the new device.
- shared tasks with the robot system will release the workers from some duties (if they choose). A reorganisation of the local sequence of tasks is required and a transition period for gaining full efficiency is expected.
Occasional accidental access to the working station beyond the intended use is expected (and protected with adequate safeguarding). Awareness and due training are expected to be part of the regular experience of operators. Workers do not have full access to the pallet station. They need to reconsider their movements.
The RECOLL methodology has therefore approached the demonstration as follows:
- human actions in the shared workspace have been classified in groups:
- intended use
- accidental access as part of foreseeable operations
- foreseeable misuses
- the groups of human-originated hazards have been classified based on nominal task assignment which is programmed into the robot system
- the groups of human-originated hazards have been acknowledged and notified to the user through user interfaces
The methodology has focused on the identification of all the set of sensors and robot-rules that can ensure safety in both intended use and unintended use [4-5].
Guidance for the definition of the human/machine interactions
In order to define the hazards in human/machine interactions, RECOLL investigates a quantitative methodology to identify the misalignment between the intended usage and the unintended usage [1]. This consists of using measuring systems (e.g. cameras) that allow the comparison of the human operator behaviour to the expected usage. The number of occurrences of hazards deriving from the intended use has therefore been applied to define the baseline of expected risk level. The number of occurrences of hazards deriving from the other two types (accidental access and foreseeable misuse) are related to the exposure to risks of different users.
This provides a description of safety-related human-robot behaviour in terms of movements, layout occupation, contacts and near misses, in a prototype machining production setup.
Specifically, as shown in Figure 1, the approach consists of:
- Identifying the Point of Interest (POI) that has to be used in order to properly measure the interaction (Fig. 1a)
- Identifying the model of interaction, that is a table with all the schema of the different interactions and what is expected by the intended behaviour for each task and sub-task (Fig. 1b)
- Identifying the path of the human inside the robot area (Fig. 1c)
- Identifying the safety rules (Fig. 1d)
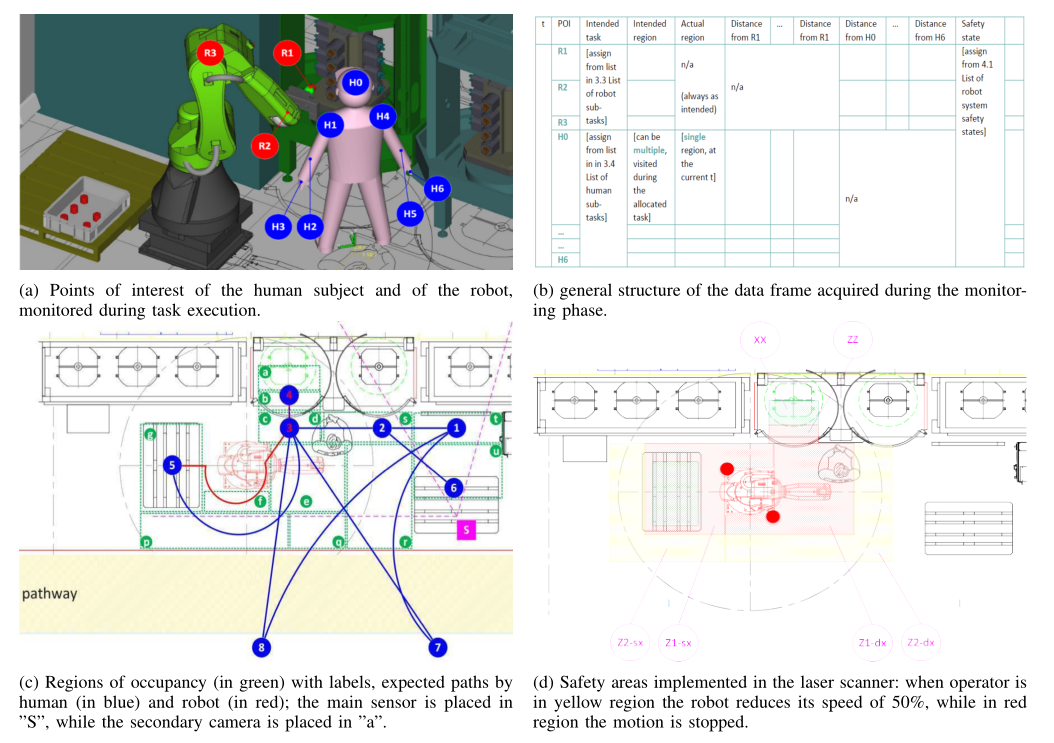
Figure 1 - How to define the Point of Interest with respect to the operating scenario, and example of the model to be checked and measured during operations
Focusing on point 2 – the modelling of the interaction, each POI is monitored during task execution. Specifically, operator POIs were monitored in terms of:
- The position with respect to the world frame
- Relative distances w.r.t. the robot POIs, which were chosen to be the elbow, shoulder and end-effector joints
- Sub-task in execution
- Regions of occupancy: the position of each POI was mapped inside a predefined set of region labels
Both the robot and the operator may or may not be expected to occupy one of the labelled regions used for partitioning the workspace, depending on the task itself. Therefore, a set of intended regions of occupancy can be defined a priori, for each action to be executed. These intended regions are recorded and put in comparison with the actual regions of occupancy for each time instant. A difference between the two for a significant number of samples has been shown to be a measure of how well the preliminary model fits the actual system operation. This provides a first hint (but not sufficient alone) of unexpected hazardous situations not included in the model.
Significant hazards also relate to the relative distances between POIs that are shorter than the minimum safety threshold corresponding to a potential contact. This threshold, established for the RECOLL demonstrator during the risk assessment stage as 0.5m, defines the safety-stop area in which the robot stops its motion when human presence is detected. The only exceptions to this rule occurred during collaborative tasks which required the closest interaction.
These measures allow understanding of when it is expected that human and robot POIs have small distances between each other, and distinguish these from cases in which this happened as a consequence of unintended use.
Statistically combining the data gathered in different task cycles with different subjects, it is expected that outliers deriving from unintended use should be easily identifiable.
Summary of Approach
The human-robot interaction has been assessed with a methodology consisting of 3 main steps:
- Risk analysis and assessment using the best industrial practice
- Identification of the interaction model according to the risk assessment, and identification of the sensors that allows the tracking of the human operator during the actual operation
- Gathering and analysing the data in order to highlight the unintended use and the correctness of the assumptions used in the risk analysis and assessment.
References
- [1] ISO/TC 299 Robotics, ISO 10218-1:2011 Robots and robotic devices — Safety requirements for industrial robots — Part 1: Robots, 2011, Geneva, International Organization for Standardization
- [2] ISO/TC 299 Robotics, ISO 10218-2:2011 Robots and robotic devices — Safety requirements for industrial robots — Part 2: Robot systems and integration, 2011, Geneva, International Organization for Standardization
- [3] ISO/TC 299 Robotics, ISO/TS 15066, Robots and robotic devices – Collaborative robots, (2016).
- [4] Federico Vicentini, Terminology in safety of collaborative robotics, Robotics and Computer-Integrated Manufacturing, Volume 63, 2020, 101921, ISSN 0736-5845,.
- [5] Matthias, Bjoern, ISO/TS 15066 - Collaborative Robots - Present Status, 2015, technical report, march, International Organization for Standardization
Contact us
Assuring Autonomy International Programme
assuring-autonomy@york.ac.uk
+44 (0)1904 325345
Institute for Safe Autonomy, University of York, Deramore Lane, York YO10 5GH
Related links
Download this guidance as a PDF:
Contact us
Assuring Autonomy International Programme
assuring-autonomy@york.ac.uk
+44 (0)1904 325345
Institute for Safe Autonomy, University of York, Deramore Lane, York YO10 5GH
Related links
Download this guidance as a PDF: